
從無人機起飛到降落,基本五個步驟就可以實現航拍全景。隨著技術進步,特別是無人機“一鍵全景功能的”的實現,省了很多人工控制拍攝的步驟,航拍全景也變得愈發簡單。本文并不針對某一型號無人機,只想從基礎原理方面介紹一下,航拍全景應該如何實現。
一、起飛
在執行完飛行前所有檢查項目和操作準備后,把無人機放在遠離人群的一個水平、安全的平臺上,在GPS模式下,攝影師遠離無人機10米,掰桿起動電機,這時候無人機已經做好起飛準備。
二、定高懸停
無人機起飛至一定高度,到達滿意位置后,精準懸停。拍攝前可根據實況構好圖,各個角度測試一圈,防止懸停不穩,高空風速影響畫面抖動。
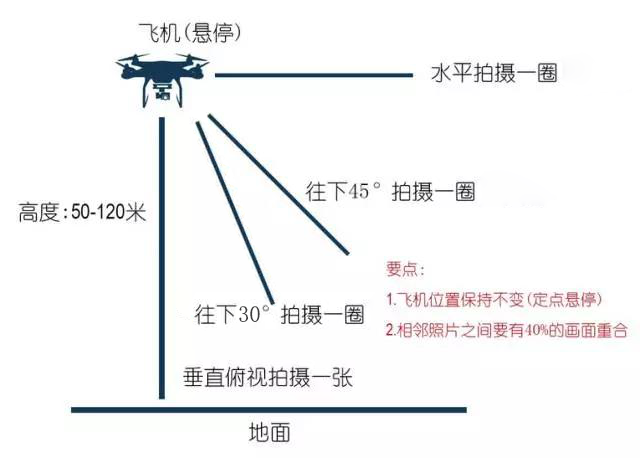
關于拍攝高度選擇,可以考慮兩方面:首先,因為后期需要進行補天,飛機一定要高于物體,并且因為沒辦法真正的在一個位置完全不漂移,所以我們需要拍攝的時候盡可能與拍攝主體拉開一段距離,不要離得太近。但是也不是越高越好,當無人機超出我們的視線或者進入民航飛行領域,飛行風險也會增大。所以給初學者的建議是50-120米。
三、設置參數
對于全景航拍來說,最大的挑戰是保持一個較大的動態范圍。天空相對于光線較暗的地面來說顯得非常明亮,這就很難在高光部分和陰影部分之間做好平衡,因此,在開始拍攝之前應對相機做好設置。
AUTO/M:M(手動)
光圈:許多航拍相機使用固定光圈(通常為f/2.8).如果是這樣的話,那就特別要小心過度曝光。
快門:速度要快
平衡良好、飛行時不帶云臺的航拍無人機只要使用適當的減震功能,通常大約1/250秒的快門速度拍攝出銳利的照片;
帶云臺的航拍無人機在最低快門速度方面完全不同:配置功能良好的三軸云臺的航拍無人機通常在快門速度為幾秒或更多的情況下,也能拍攝出銳利的照片。
ISO:盡可能地低(現在多數航拍相機都使用小型傳感器,ISO較高時,容易產生噪點)
白平衡:用戶定義,5100K日光條件下
Grid:網格線(控制云臺的準線)
四、旋轉拍攝
1.相機水平狀態下拍攝一圈
在app中觀察相機取景,找到一個物體作為參照物,拍攝第一張,水平旋轉鏡頭,利用參考線及目測第二張圖與第一張圖畫面有40%重合時,進行拍攝。然后依次進行旋轉、拍攝,直到水平360度景物全部被記錄下來,大概拍攝張數為8-10張,具體以相機取景重合為準。
2.調整相機俯仰至向下30-45度拍攝一圈
3.俯仰至向下50-60度拍攝一圈
4.俯仰至向下90度拍攝一張或多張
在這里說明一下,以上給出的拍攝圈數和張數,并不是標準法則,只是提供參考。具體拍攝張數需要攝影師自行總結,最終達到的效果就是把所有的畫面都涵蓋到。
整個拍攝過程可以用一張圖來表示
五、降落
拍攝完畢后,當無人機進行降落時,一定注意要控制下降速度,最好是緩慢下降,防止飛行器落地的撞擊損壞飛行器。












